

스크립트없이 플레이어를 추적하고 팔로우하는 로버/로봇 설정에 대한 빠른 가이드. 행성에서만 작동합니다 (지금은…) A.I에 의해 쓸모 없게 될 것입니다. 업데이트.
소개 및 승인
무엇보다도, 나는 여기 거인의 어깨에 서 있습니다. Blackarmor 및 Splitsie와 같은 엔지니어는이 게임에서 상자 밖에서 생각하게 한 두 가지 큰 이름입니다.. 도대체, 자이로 추적 시스템은 Blackarmor의 초기에서 큰 영감을 얻습니다. (사전 터릿 컨트롤러) 플레이어 추적 라이트 디자인.
내가 왜 첫 번째 플레이어 추적 로버를 디자인했는지 기억이 안 돼요. 나는 그것이 디자인의 운동이라고 생각합니다, 프로그래밍 가능한 블록없이 내가 할 수있는 일을보기 위해. C#을 이해하는 사람들에게, 나는 당신에게 경의를 표합니다. 객체 지향 프로그래밍을 이해하려고 노력했습니다, 그리고 내가 얻은 것은 두통이었다.
PTR-4를 게시 할 예정입니다, 그리고 더 작습니다 (어떤 사람들은 말할 수도 있습니다 “귀여운”) 사촌, 워크숍에 PTR-3. 그냥 가서 워크숍 청사진을 받고 싶은 유혹이있을 수 있습니다., 먼저 자신의 것을 구축하도록 권장합니다. 이제 가기 전에 말하기 전에 “그러나 나는 충분히 똑똑하지 않습니다” 또는 “나는 이런 것들을 잘하지 못한다” 이 가이드를 배울 수있는 기회로 사용하십시오. 이 로버들을 디자인 할 때 톤에 실패했다고 말할 때 나를 믿어, 그리고 초기 디자인은 가장 미미하지 않았습니다..
자이로의 빠른 프라이머
솔직히 말하자면, 자이로는 아마도 자신의 가이드를받을 자격이 있습니다. 사실은, 나는 이미 더 나은 가이드와 튜토리얼이 만들어 졌다고 확신합니다.. 그래서 여기에 당신을 다소 속도에 맞추는 빠른 것이 있습니다..
자이로는 토크를 적용하는 장치입니다, 또는 그리드로의 회전력. 대부분의 경우 자이로는 플레이어 입력과 함께 사용하여 동적 방향을 제어합니다. (움직일 수 있는) 그리드. 자이로 오버라이드가 활성화되면 자이로는 그리드를 회전 시키려고 시도합니다., 플레이어 입력을 무시하십시오. 회전 속도와 회전 축은 자이로 설정에서 결정됩니다.. 플레이어 추적을 위해, 자이로는 무시됩니다.
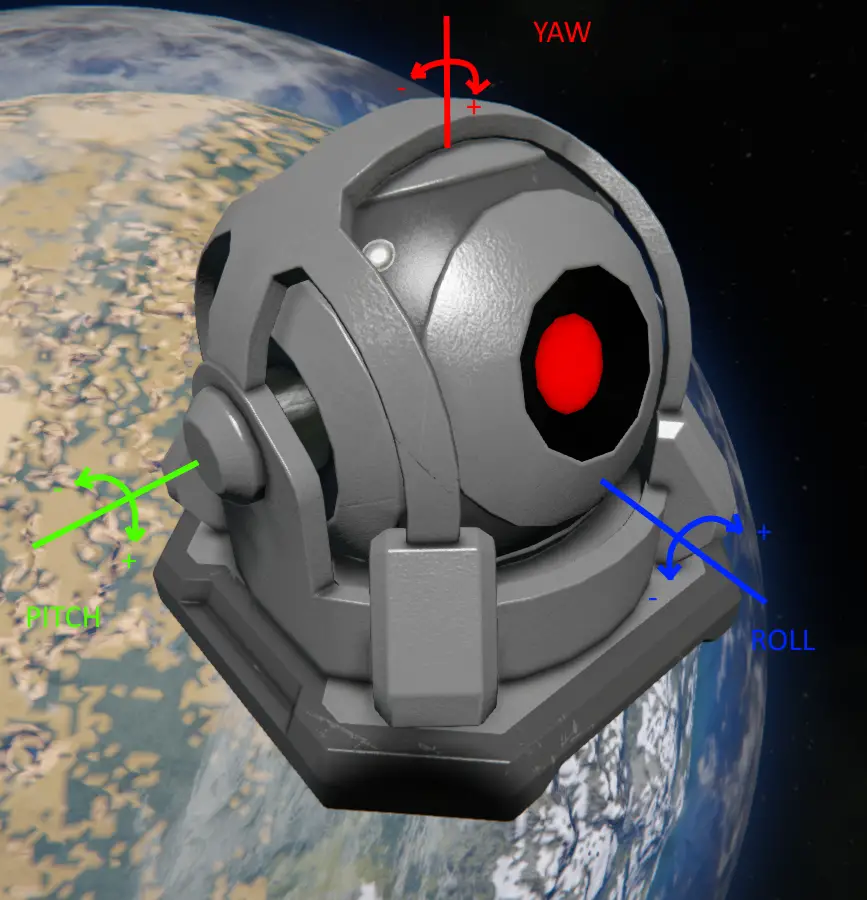
위의 이미지에서는 축을 볼 수 있습니다 (“축”) 자이로의 회전, 그리고 긍정적 인 회전의 방향 (+) 또는 부정적인 (-) 값을 무시합니다. 작은 그리드 자이로의 한쪽에는 하나의 divot/dot이 있습니다. (표시,) 그리고 다른쪽에는 두 가지가 있습니다. 이 세부 사항은 적절한 자이로 배치 및 설정 조정에 중요합니다..
PTR-4 기본 로버/로봇 섀시
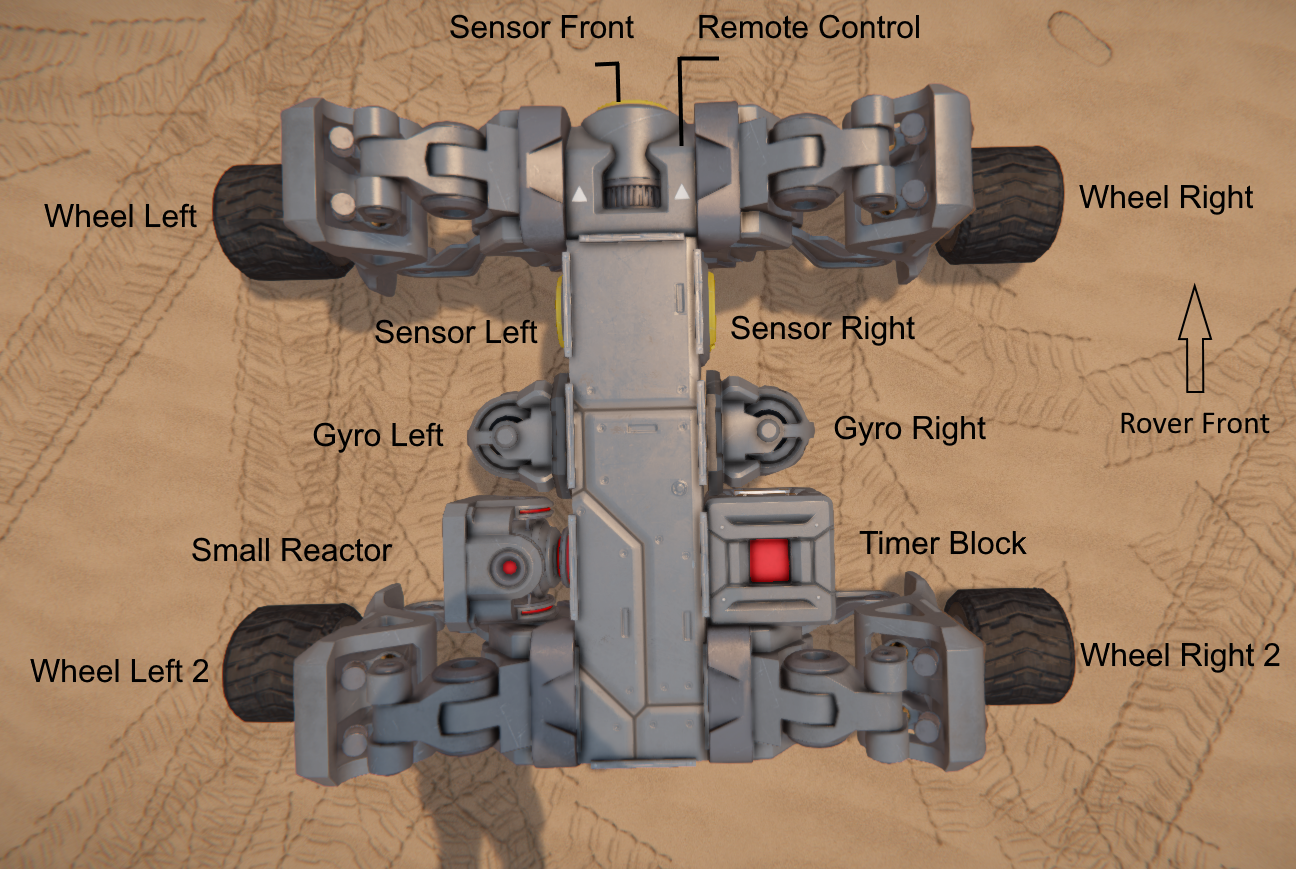
PTR-4는 내 PTR의 4 세대입니다 (또는 피터) 일련의 로버, 그리고 스크립트가없는 개발의 다섯 번째 변형 “로봇.” PTR-4 레이아웃을 열도록 설계했습니다, 그리고 (바라건대) 이해하기 쉽습니다. 아래에, 로버의 레이아웃을 볼 수 있습니다, 그리고 모든 구성 요소.
건축을위한 몇 가지 팁: 먼저 제어판으로 블록을 배치하는 것이 좋습니다.. 이것은 센서가 될 수 있습니다, 또는 반응기. 그리드의 제어판에 액세스하는 방법 만 있으면됩니다.. 이렇게하면 블록을 배치 할 때 블록의 이름을 바꿀 수 있습니다., 특히 센서와 자이로 (이름 지정 체계의 레이아웃 이미지를 참조하십시오.) 이름을 쉽게 변경할 수 있도록 대칭이없는 건물을 권장합니다.. 내가 건물을 마친 후 어떤 블록이 어떤 블록인지 알아 내기보다는 빌드 할 때 이름을 바꾸는 것이 더 쉽다고 말할 때 나를 믿으십시오..
완전한 부품 목록:
- 휠 서스펜션 1×1 왼쪽 (x2)
- 휠 서스펜션 1×1 오른쪽 (x2)
- 가벼운 갑옷 블록 (x4)
- 감지기 (x3)
- 원격 제어 (x1)
- 자이로 스코프 (x2)
- 타이머 블록 (x1)
- 작은 원자로 (x1)
어떤 경우에는 블록 배치가 중요합니다. 이 가이드를 팔로우하고 PTR-4 복사하는 경우 (또는 워크숍 청사진을 엉망으로 만들었습니다) 고려해야 할 몇 가지 중요한 세부 사항이 있습니다. 첫 번째 세부 사항은 자이로입니다. 첫 번째 플레이어 추적 로버를 디자인했을 때 두 자이로가 로버의 후면을 향한 단일 디봇/도트를 갖도록 만들었습니다.. 이것은 본질적으로 자이로스를 반영하게 만듭니다, 두 자이로가 동일한 설정을 갖도록 허용합니다. 두 번째 세부 사항은 센서 방향입니다. 중요하지는 않지만, 센서는 표시기 스트립이 바닥에 있도록 방향을 향해야합니다., 그리고 상단의 제어판.

그리드 제어판 설정
그리고 이제 플레이어 추적 로버를 건축하는 것의 가장 지저분한 부분이 될 것입니다.: 제어판에서 그리드 설정. 당신이 구성 요소를 만들었을 때 구성 요소로 이름을 바꾸기를 바랍니다., 특히 센서와 자이로.
휠 설정
- 힘: 60
- 힘: 100
- 마찰: 25
- 속도 제한: 조정할 수 있는 (나는 사용한다 40 kph)
- 추진 재정의: 10% (.1) – 오른쪽 바퀴는 음의 재정의가 필요할 수 있습니다.
나는 내 바퀴를 몇 가지 방법으로 그룹화하는 것을 좋아합니다. 먼저 나는 모든 바퀴가 달린 그룹을 만듭니다, 이것은 한 번에 모든 휠의 설정을 편집하는 데 유용합니다.. 다음으로 왼쪽 휠 그룹을 만듭니다, 그런 다음 오른쪽 바퀴. 어떤 이유로 든 올바른 바퀴는 음의 재정의가 필요할 수 있습니다.. 이 가이드의 튜닝/디버그 섹션에서 다루어집니다.. 바퀴가 설정된 후 로버를 테스트 할 준비가 될 때까지 제어판에서 전환하십시오.. 로버를 테스트 할 때는 저속 제한을 권장하여 로버를 잡을 수 있습니다..
자이로 설정
자이로 설정은 실제로 매우 간단합니다. 먼저 두 자이로가 꺼져 있는지 확인하십시오. 다음으로 자이로 제어판에서 오버라이드 상자를 확인하십시오.. 이 안내서를 복사하는 경우, 두 자이로는 피치 오버라이드를 가져야합니다 +18 RPM. 이것은 자이로가 그리드를 회전 시키려고한다는 것을 의미합니다. 18 RPM (그래도 그렇게 빨리 회전해서는 안됩니다.)
센서 설정
플레이어/캐릭터 만 감지하도록 모든 센서를 설정해야합니다., 소유자 만 감지하도록 설정합니다. 다른 모든 탐지 옵션을 설정해야합니다 “끄다.”
앞쪽
- 감지 슬롯 (왼쪽) 원격 제어 – 주차/끄기
- 감지 손실 슬롯 (오른쪽) 타이머 블록 – 지금 트리거
- 왼쪽 범위: 2
- 올바른 범위: 2
- 바닥 범위: 2
- 최상위: 2
- 등 범위: 5
- 전면 범위: 4
왼쪽
- 감지 슬롯 (왼쪽) 자이로 L – 전환하십시오
- 감지 손실 슬롯 (오른쪽) 자이로 L – 전환하십시오
- 왼쪽 범위: 50
- 올바른 범위: 50
- 바닥 범위: 2
- 최상위: 2
- 등 범위: .5
- 전면 범위: 50
오른쪽
- 감지 슬롯 (왼쪽) 자이로 r – 전환하십시오
- 감지 손실 슬롯 (오른쪽) 자이로 r – 전환하십시오
- 왼쪽 범위: 50
- 올바른 범위: 50
- 바닥 범위: 2
- 최상위: 2
- 등 범위: .5
- 전면 범위: 50
메모: 당신이 나와 같다면, 센서의 블리핑은 잠시 후 성가 시게됩니다.. 제어판의 센서의 가청 감지 설정을 끄는 것을 잊지 마십시오..
타이머 블록 설정
타이머 블록은 해결 방법으로 필요합니다. 센서의 기발한 중 하나는 동일하게 가질 수 없다는 것입니다. “블록 행동” 두 탐지 모두에 대한 트리거 (왼쪽 슬롯,) 그리고 탐지 손실 (오른쪽 슬롯.) 게임은 그 액션을 설정하려고 시도한 마지막 슬롯으로 이동합니다.. 원격 제어 블록에는 주차장 온/오프 토글이 있기 때문에, 명령을 명시하지 않습니다, 전면 센서가 플레이어를 감지 할 때 브레이크를 전환 할 수 있도록 타이머가 필요합니다., 그리고 더 이상 플레이어를 감지하지 않으면. 타이머를 설정합니다, 타이머 액션 바에서 원격 제어 블록의 주차 온/오프 토글 설정. 전면 센서가 설정 되므로이 빌드의 시간 지연 값은 중요하지 않습니다. “지금 트리거.”
로버/로봇 조정 및 디버깅
솔직히 말해요, 나는 여전히 이것들을 적극적으로 실험하고 있습니다. 이 섹션은 자신의 로버를 구축하는 동안 발생할 수있는 몇 가지 문제를 다룹니다., 튜닝 팁뿐만 아니라 (대부분 자이로스와 휠 설정.)
바퀴가 회전하고 있습니다, 그러나 로버는 호핑되고 있습니다, 또는 회전하려고합니다.
로버를 설정 한 후이 동작이 보이면, 휠 오버라이드 방향을 확인하십시오. 어떤 이유로 든 내가 만든 마지막 몇 개의 PTR은 오른쪽 휠에 네거티브 오버라이드가 필요합니다.. 로버가 당신에게서 뒤로 물러서 기 시작하면, 바퀴의 모든 재정의를 뒤집어 야합니다.
로버는 가지 않을 것입니다, 또는 프론트 센서가 플레이어를 감지 할 때 멈추지 않습니다..
이 문제는 주로 주차 브레이크가 전환 되었기 때문입니다., 명시 적으로 켜지거나 끄지 않습니다. 이 문제가 발생하면 로버의 제어판에 액세스하고 리모컨 블록에서 주차장/오프 상태를 변경하십시오..
로버는 엔지니어를 돌고 멈추지 않습니다.
이것은 일반적으로 자이로 스코프의 불충분 한 재정의 값으로 인해 발생합니다.. 로버는 끊임없이 회전하고 있습니다, 그러나 회전 속도는 로버가 그 어느 때보 다 충분하지 않습니다. “맞닥뜨리다” 엔지니어. 이 문제를 해결하려면, 작은 단위로 자이로 재정의를 늘리십시오 (~ .5 – 1 RPM) 로버가 더 이상 없을 때까지 “궤도” 엔지니어.
엔지니어를 따르려고 할 때 로버가 불규칙하게 회전하고 있습니다..
이것은 몇 가지 문제로 인해 발생할 수 있습니다.
첫 번째 문제는 자이로 오버라이드가 너무 높게 설정되어 있다는 것입니다.. 추적이 약간 부드러워 질 때까지 재정의 값을 작은 단위로 줄이십시오.. 그래도 너무 많이 낮추지 않도록주의하십시오, 이로 인해 발생할 수 있습니다 “궤도” 앞서 논의한 행동.
자이로 설정이 괜찮아 보입니다, 그러나 추적은 여전히 불규칙합니다, 바퀴의 마찰을 낮추려고 할 수 있습니다. 마찰을 낮추면 자이로의 토크 임계 값이 낮아집니다., 그리고 그들은 로버를 더 매끄럽게 돌릴 수있을 것입니다. 그래도 조심하십시오, 휠 마찰을 낮추는 것은 로버의 중지 능력을 방해합니다.. 로버는 또한 견인력이 낮아 속도를 높이기 위해 더 많은 시간이 필요합니다..
로버는 엔지니어에서 멈 춥니 다, 그러나 끊임없이 좌회전합니다.
위의 불규칙한 추적 섹션과 유사합니다, 하지만 튜닝을 시도 할 수있는 것이 하나 더 있습니다.. 왼쪽 및 오른쪽 센서의 등 범위를 높이면 오버랩이 생성됩니다. “복도.” 이 복도에서 엔지니어가 감지되면 두 자이로가 활성화됩니다., 그리고 로버는 더 빨리 안정화 될 것입니다. 이 복도의 너비는 로버의 추적 정확도에도 영향을 미칩니다. (나는 여전히 로버를 조정하기위한이 방법을 적극적으로 실험하고 있습니다.)
로버는 빌더만을 따릅니다, 의도 된 선수가 아닙니다.
로버를 갖기 위해 다른 선수를 따르십시오, 그리드 소유자로 설정하십시오. 제어판으로 이동해야합니다, 제어판에서 모든 모듈을 선택하십시오 (PC 용 Ctrl+A,) 의도 한 선수에게 소유권을 전송합니다.
로버가 온통 미끄러 져 들어가고 있습니다, 엔지니어를 추적하지 않습니다.
로버와 마찬가지로 (파일럿 또는 자율성,) 표면을 위해 휠 마찰 설정을 조정해야합니다.. 나는 대부분의 암석과 흙 표면에 대해 그것을 발견합니다 25% 잘 작동합니다. 로버가 주로 움직이는 경우 “야바위꾼” 얼음처럼 표면, 또는 갑옷 블록, 더 높은 마찰 설정이 필요합니다.
로버는 엔지니어로 계속 달려 있습니다, 또는 충분히 빨리 멈추지 않습니다.
이것은 몇 가지 방법으로 고정 될 수 있습니다.
브레이크를 적용하면 로버가 더 빨리 멈출 수 있도록 휠 마찰을 늘릴 수 있습니다.. 로버의 추적 응답에 영향을 줄 수 있으므로 마찰을 너무 많이 늘리지 않도록주의하십시오..
로버가 엔지니어를 더 빨리 감지하여 전면 센서의 전면 오프셋을 늘릴 수도 있습니다., 그리고 멈출 수있는 더 많은 거리가 있습니다. 이 방법의 절충은 엔지니어가 “멈추다” 더 긴 구역.