

カメラや監視システムに英語ガイドが見つかりませんでした, だからここに私がゼロから作った例があります. それらの厄介なボットとピエロが何をしているのかを他にどのように知ることができますか?
あなたが必要とするもの
このガイドは、潜水艦の編集者の使用方法を説明するつもりはありません, 他の場所や自分でそれを学ぶ必要があります.
ペリスコープに加えて n カメラ, これらのコンポーネントが必要です:
- 1 各カメラのリレーコンポーネント (カメラ信号ソースを制御します)
- 1 各カメラの信号コンポーネント (クリック時に各リレーがオフになるようにするには)
- 1 各カメラのコンポーネントを遅らせます (と 1 または 0.5 遅れ, それはあなた次第です)
私はあなたの新しいカメラシステムの周りにいまいましいもの全体を構築する代わりに、実際にあなたのサブを完成させ、カメラが必要な場所を決定することをお勧めします. 😛
これらのコンポーネントのプロパティのために変更しなければならない唯一のことは、エディターのデイジーチェーンの最初のリレーをオンにすることです (デフォルトでオンになっています) そして、他のすべてのリレーをオフにします.
適切に完了した場合, カメラのコントロールはチェーン内の最後のリレーから始まり、すべてのカメラがマウスクリックして次々にループできるようにします.
配線
各コンポーネントの配線がどのように進むかを次に示します.
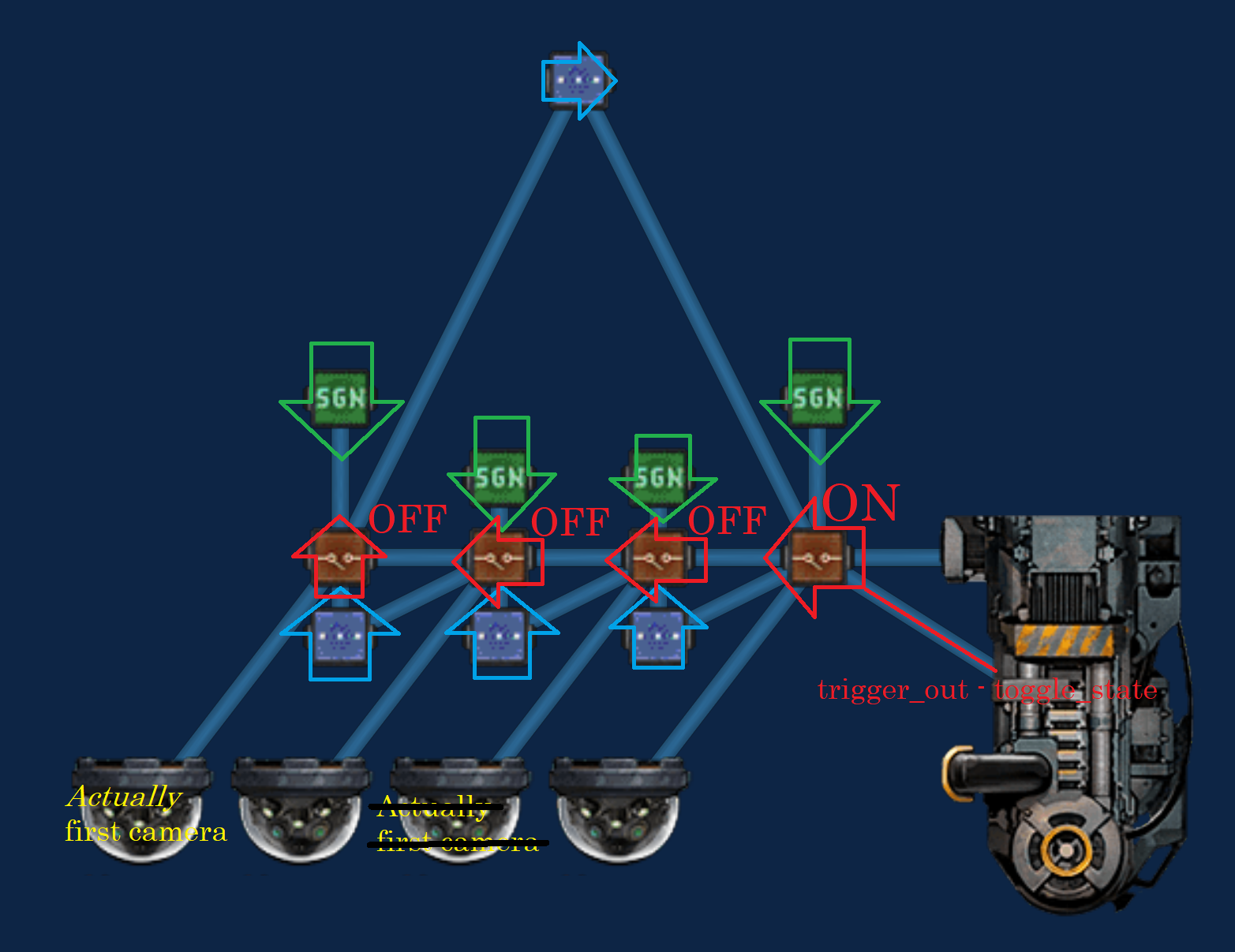
ペリスコープからのワイヤー position_out 各リレーにピン留めします signal_in_1 ピン.
ペリスコープからのワイヤー trigger_out 各リレーにピン留めします signal_in_2 ピン.
トリガー信号も最初のリレーに個別に配線する必要があります (trigger_out -> toggle_state)!

前述したように, 最初のリレーもエディターでオンにするように設定する必要がありますが、後続のリレーはオフにする必要があります. これが正しく行われない場合、ループを繰り返すことはできません.
画像は、配線がどのように見えるかを示しています 初め リレーコンポーネント! 他のすべてのリレーは、toggle_stateピンにワイヤが1つ少ない.
各リレーから, からのワイヤー signal_in_1 カメラControl_inにピンを固定します ピン.
からのワイヤー signal_in_2 各リレーのペアの信号と遅延コンポーネントにピン留めします signal_in ピン.
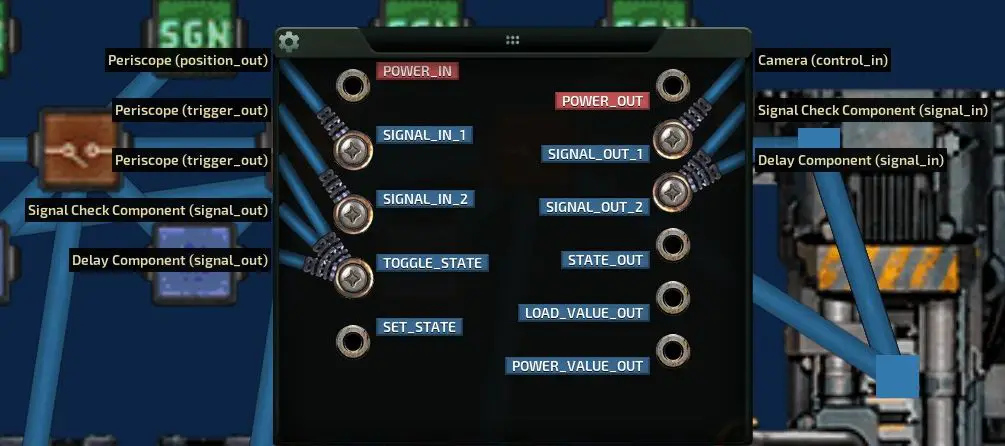
他のすべてのリレーコンポーネントは同一である必要があります を除外する Periscopeからのtrigger_out信号が不足していることは、toggle_stateに直接入ります.
信号チェックは信号をループするためだけにあるので、リレーがトリガー入力を受信するとリレーがオフになり、次のリレーがペリスコープからの出力を処理できるようにします.
ワイヤー signal_out 各信号からそのソースリレーに戻ります toggle_state ピン.
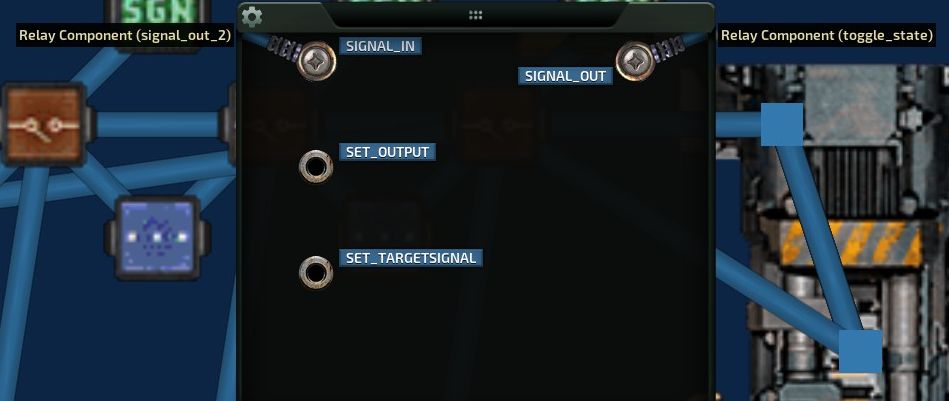
コンポーネントプロパティの好みに遅れを変更できます. 私は好きです 0.5 2番目の遅延.
ワイヤー signal_out 各遅延から次のリレーまで toggle_state ピン.

動作中のカメラシステムの記録
と 0.5 遅れ
https://Youtu.be/e35uebrx7o4
したがって、配線の要点は、マウスクリックで各リレーから各カメラから次のカメラへのビューを単純に渡すことです.
改善に関するご質問や提案がある場合は、コメントでお知らせください. 🙂 私はこれがそれほどガイドではないことを知っていますが、あなたが潜水艦の編集者と配線の基本を学ぶなら, あなたは自分でこれを構築できるはずです. ある時点でもワークショップでシステムをリリースするかもしれません. 読んでいただきありがとうございます!
これが今日私たちがこの目的で共有するすべてです 圧外傷 ガイド. このガイドは元々、次の者によって作成および執筆されました。 76561198014977458. このガイドを更新できなかった場合, これに従って最新のアップデートを見つけることができます リンク.